Dans ce chapitre, on se place dans un plan, un repère orthonormé  et une base orthonormée
et une base orthonormée  .
.
I – Vecteur directeur d’une droite
 et un vecteur
et un vecteur  . est un vecteur directeur de si et seulement s’il existe deux points
. est un vecteur directeur de si et seulement s’il existe deux points  et
et  de tels que les vecteurs et
de tels que les vecteurs et  soient colinéaires.
soient colinéaires.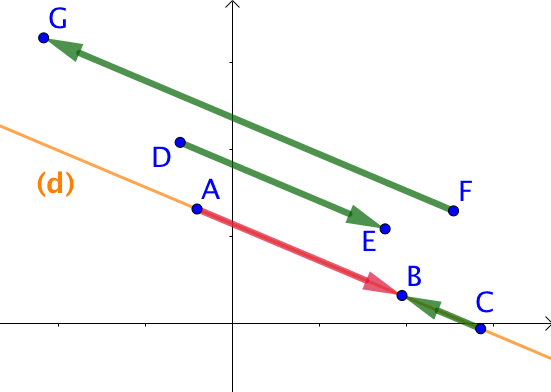 Exemple :
Exemple :
Sur la figure de droite, tous les vecteurs de couleur verte sont colinéaires au vecteur . Ce sont tous des vecteurs directeurs de la droite (d).
Bien évidemment, est aussi un vecteur directeur de (d).
Conséquences :
- Une droite a une infinité de vecteurs directeurs.
- Tous les vecteurs directeurs d’une droite sont colinéaires entre eux.
et un vecteur . La droite passant par et de vecteur directeur est l’ensemble des points  tels que et
tels que et  soient colinéaires.
soient colinéaires.Démonstration : Si est un vecteur directeur de la droite passant par , alors il existe un point tel que et sont colinéaires.
Soit un point quelconque de cette droite, alors les points , et sont alignés, ce qui implique que les vecteurs et sont colinéaires.
Sachant que et sont colinéaires, il vient que et sont colinéaires.
II – Équation cartésienne d’une droite
À partir d’un exemple
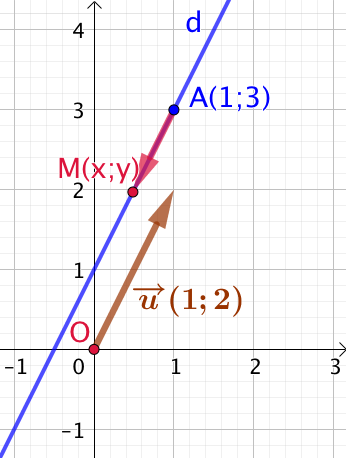 Considérons la droite passant par
Considérons la droite passant par  et de vecteur directeur
et de vecteur directeur  .
.
Soit  un point quelconque de la droite . Les coordonnées du vecteur sont
un point quelconque de la droite . Les coordonnées du vecteur sont  et
et  .
.
Alors nous savons que les vecteurs et sont colinéaires. Donc leur déterminant est nul :  .
.
On développe cette égalité :  .
.
On la simplifie :  . Cette relation est l’équation cartésienne de la droite . Cette équation est la « carte d’identité » de la droite. Tout ce que l’on peu savoir sur cette droite est contenu dans cette relation. Plus précisément elle définit qu’un point appartient à cette droite à la condition que ses coordonnées
. Cette relation est l’équation cartésienne de la droite . Cette équation est la « carte d’identité » de la droite. Tout ce que l’on peu savoir sur cette droite est contenu dans cette relation. Plus précisément elle définit qu’un point appartient à cette droite à la condition que ses coordonnées  soit une solution de l’équation.
soit une solution de l’équation.
Vérifions à l’aide de cette équation que le point appartient bien à . Pour cela remplaçons dans l’équation , par  :
:
 est bien égal à 0 dont est bien une solution de l’équation . Cela suffit pour vérifier que est sur la droite .
est bien égal à 0 dont est bien une solution de l’équation . Cela suffit pour vérifier que est sur la droite .
Question : Puisque cette équation est la carte d’identité de la droite, on devrait la retrouver en prenant un autre point de la droite, choisi à la place de et en prenant un autre vecteur directeur de cette droite, choisi à la place de .
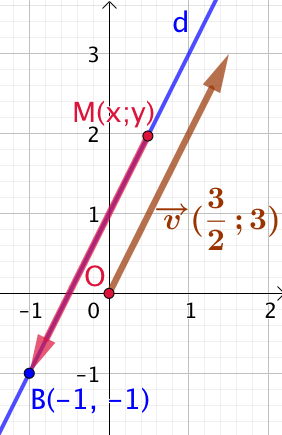 Soient le point
Soient le point  de la droite et
de la droite et  , un autre vecteur directeur de . Je laisse à l’élève le soin de vérifier que et
, un autre vecteur directeur de . Je laisse à l’élève le soin de vérifier que et  sont bien colinéaires.
sont bien colinéaires.
On va reprendre à l’identique ce qui a été fait avec et .
Soit un point quelconque de la droite . Les coordonnées du vecteur  sont
sont  et
et  .
.
et sont colinéaires. Donc leur déterminant est nul :  .
.
On développe cette égalité :  .
.
On la simplifie :  .
.
On multiple chaque membre de l’égalité par  :
: 
On divise chaque membre de légalité par  :
:  , c’est-à-dire :
, c’est-à-dire :  . C’est bien l’équation cartésienne de la droite . Elle ne dépend pas du point et du vecteur directeur choisis.
. C’est bien l’équation cartésienne de la droite . Elle ne dépend pas du point et du vecteur directeur choisis.
 et l’ordonnée
et l’ordonnée  de tout point de cette droite et uniquement les points de cette droite.
de tout point de cette droite et uniquement les points de cette droite.
L’équation cartésienne d’une droite est de la forme :  pour laquelle
pour laquelle  ,
,  et
et  sont des nombres réels fixes.
sont des nombres réels fixes.
Démonstration : Soit la droite passant par  et de vecteur directeur
et de vecteur directeur  .
.
Soit un point quelconque de la droite . Les coordonnées du vecteur sont  et
et  .
.
Alors nous savons que les vecteurs et sont colinéaires. Donc leur déterminant est nul :  .
.
On développe cette égalité :  que l’on présente ainsi :
que l’on présente ainsi :  . C’est l’équation cartésienne de la droite .
. C’est l’équation cartésienne de la droite .
En posant :  ,
,  et
et  , on retrouve bien une équation de la forme
, on retrouve bien une équation de la forme  .
.
 REMARQUE : L’équation cartésienne d’une droite n’est pas une unique. Si
REMARQUE : L’équation cartésienne d’une droite n’est pas une unique. Si  est une équation cartésienne d’une droite alors pour tout réel
est une équation cartésienne d’une droite alors pour tout réel  non nul, l’équation :
non nul, l’équation :  est aussi une équation cartésienne de la même droite.
est aussi une équation cartésienne de la même droite.
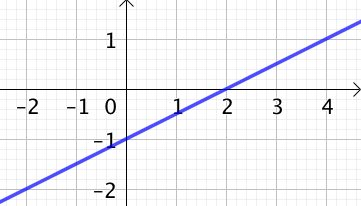
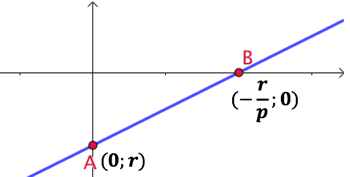
La droite représentée ci-contre a comme équation cartésienne :  . En multipliant par les deux termes de cette équation, on obtient une autre équation cartésienne de cette droite :
. En multipliant par les deux termes de cette équation, on obtient une autre équation cartésienne de cette droite :  .
.
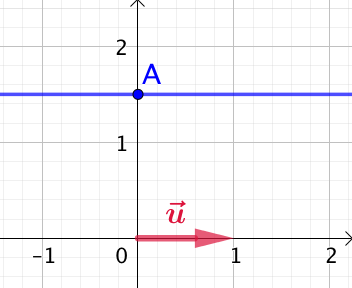
- Si est une droite parallèle à l’axe des ordonnées, alors il existe un nombre réel tel qu’une équation cartésienne de est
 .
. - Si est une droite parallèle à l’axe des abscisses, alors il existe un nombre réel tel qu’une équation cartésienne de est
 .
.
Démonstration :
Si est parallèle à l’axe des ordonnées, le vecteur  est un vecteur directeur de .
est un vecteur directeur de .
Soit un point particulier de . On a vu dans la démonstration précédente que si est un point de alors le déterminant des vecteurs  et est nul.
et est nul.
Cela conduit à l’égalité :  , soit
, soit  ou plus simplement
ou plus simplement  .
.
En posant  , on obtient une équation cartésienne de : .
, on obtient une équation cartésienne de : .
La démonstration concernant les droites parallèles à l’axe des abscisses est très proche.
, et , trois nombres réels tels que et ne soient pas tous les deux nuls. L’ensemble  des points de coordonnées
des points de coordonnées  qui vérifient l’équation est une droite dont un vecteur directeur est
qui vérifient l’équation est une droite dont un vecteur directeur est  .
.Démonstration :
 1er cas :
1er cas :  . Alors l’équation se réduit à
. Alors l’équation se réduit à  , soit
, soit  et finalement
et finalement  .
.
Ainsi tous les points de ont la même pour ordonnée :  , quelle que soit la valeur de leurs abscisses. Conclusion : est la droite parallèle à l’axe des abscisses passant, par exemple, par le point de coordonnées
, quelle que soit la valeur de leurs abscisses. Conclusion : est la droite parallèle à l’axe des abscisses passant, par exemple, par le point de coordonnées  .
.
Un vecteur directeur de est  .
.
Dans l’exemple de droite :  et
et  .
.
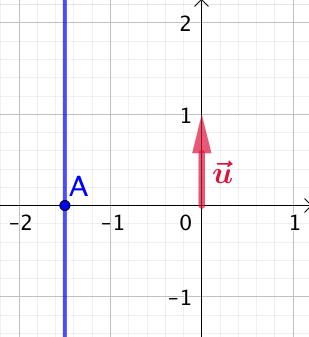 2ème cas :
2ème cas :  . Alors l’équation se réduit à
. Alors l’équation se réduit à  , soit
, soit  et finalement
et finalement  .
.
Ainsi tous les points de ont la même pour abscisse :  , quelle que soit la valeur de leurs ordonnées. Conclusion : est la droite parallèle à l’axe des ordonnées passant, par exemple, par le point de coordonnées
, quelle que soit la valeur de leurs ordonnées. Conclusion : est la droite parallèle à l’axe des ordonnées passant, par exemple, par le point de coordonnées  .
.
Un vecteur directeur de est  .
.
Dans l’exemple de droite :  et
et  .
.
3ème cas :  ,
,  et
et  . Alors l’équation se réduit à
. Alors l’équation se réduit à  . On peut découvrir deux points de :
. On peut découvrir deux points de :  et
et  . Les coordonnées de
. Les coordonnées de  sont évidemment
sont évidemment  .
.
Soit un point quelconque de . Les coordonnées de  sont .
sont .
Le déterminant de et est  .
.
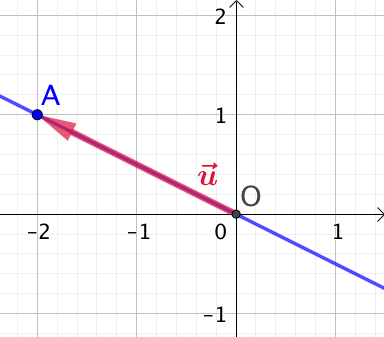 Or
Or  donc
donc  . Par conséquent le déterminant de et est nul, donc les deux vecteurs sont colinéaires, c’est-à-dire que les trois points
. Par conséquent le déterminant de et est nul, donc les deux vecteurs sont colinéaires, c’est-à-dire que les trois points  , et sont alignés : est un point de la droite
, et sont alignés : est un point de la droite  .
.
Avant de conclure que est la droite  , il faut démontrer, qu’inversement, tout point de appartient à :
, il faut démontrer, qu’inversement, tout point de appartient à :
Soit  . Alors et sont colinéaires, donc leur déterminant est nul, ce qui donne l’égalité :
. Alors et sont colinéaires, donc leur déterminant est nul, ce qui donne l’égalité :  , soit . Donc
, soit . Donc  .
.
On peut donc en conclure que est la droite .
Dans l’exemple ci-contre : et  .
.
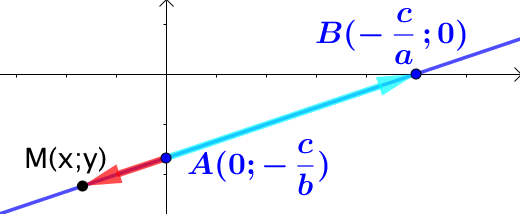 4ème cas : , et
4ème cas : , et  . Les deux points
. Les deux points  et
et  obtenus précédemment appartiennent à et ne sont pas confondus puisque . Donc
obtenus précédemment appartiennent à et ne sont pas confondus puisque . Donc  .
.
Les coordonnées du vecteur sont  .
.
Soit un point quelconque de . Les coordonnées du vecteur sont  .
.
Calculons le déterminant des vecteurs et :
![\[ - \dfrac{c}{a} \times (y + \dfrac{c}{b}) - \dfrac{c}{b} \times x = - \dfrac{cy}{a} - \dfrac{c^2}{ab} - \dfrac{cx}{b} = - \dfrac{cyb}{ab} - \dfrac{c^2}{ab} - \dfrac{acx}{ab} = -\dfrac{bcy + c^2 + acx}{ab} = -\dfrac{c(by + c + ax)}{ab} = -\dfrac{c(ax + by + c)}{ab} \]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-8faa59f239aa7c96dbf006f4e290e9f5_l3.png "Rendered by QuickLaTeX.com")
Or par hypothèse donc les coordonnées de vérifient l’équation . Par conséquent le déterminant des vecteurs et est nul.
Cela signifie que ces deux vecteurs sont colinéaires, donc les points , et sont alignés. Conclusion : tout point de appartient à la droite .
Avant de conclure que est la droite , il faut démontrer, qu’inversement, tout point de appartient à :
Soit  . Alors et sont colinéaires, donc leur déterminant est nul, ce qui donne l’égalité :
. Alors et sont colinéaires, donc leur déterminant est nul, ce qui donne l’égalité :  .
.
Alors  . Comme , il vient . Donc .
. Comme , il vient . Donc .
On peut donc en conclure que est la droite .
Dernier point à vérifier : le vecteur est-il un vecteur directeur de ? Comme  , il est évident que est un vecteur directeur de .
, il est évident que est un vecteur directeur de .
Posons  . Notons que
. Notons que  . Le vecteur
. Le vecteur  est colinéaire à donc c’est aussi un vecteur directeur de .
est colinéaire à donc c’est aussi un vecteur directeur de .
Les coordonnées de sont : . Donc :
- l’abscisse de :
 et
et - l’ordonnée de :

qui sont exactement les coordonnées de .
dont une équation cartésienne est et une droite  dont une équation cartésienne est
dont une équation cartésienne est  .
.
Les droites et sont parallèles si et seulement si 
Démonstration :
1ère partie : Supposons que  . Alors leurs vecteurs directeurs sont colinéaires.
. Alors leurs vecteurs directeurs sont colinéaires.
Un vecteur directeur de est  et un vecteur directeur de est
et un vecteur directeur de est  . Si et sont colinéaires alors leur déterminant est nul. Ce qui donne :
. Si et sont colinéaires alors leur déterminant est nul. Ce qui donne :
2ème partie (réciproque) : Supposons que , alors le déterminant de et est nul, donc ces deux vecteurs directeurs sont colinéaires. Ce qui permet d’affirmer que les deux droites sont parallèles.
III – Équation cartésienne réduite
dont une équation cartésienne est telle que . Alors possède une équation cartésienne réduite de la forme  .
.Démonstration :
 Soit une droite dont l’équation cartésienne est telle que . Alors
Soit une droite dont l’équation cartésienne est telle que . Alors 
Comme , on peut diviser les deux membres de l’égalité par :  , soit
, soit  .
.
En posant  et
et  , on obtient l’équation cartésienne réduite de la droite :
, on obtient l’équation cartésienne réduite de la droite :  .
.
On rappelle que  est le coefficient directeur ou la pente de la droite.
est le coefficient directeur ou la pente de la droite.
Remarque : Si une droite possède une équation cartésienne réduite, celle-ci est unique.
Remarque : On retrouve un résultat déjà rencontré dans le chapitre sur les fonctions affines.
Remarque : On a vu au cours de la démonstration de la propriété précédente, que le cas correspond à une droite parallèle à l’axe des ordonnées. Ce sont les seules droites qui ne possèdent pas d’équation réduite.
d’équation réduite , un vecteur directeur de est  .
. Démonstration :
Démonstration :
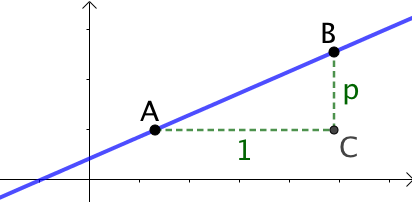
Si l’équation réduite de est alors une équation cartésienne de est  . On sait alors qu’un vecteur directeur de est .
. On sait alors qu’un vecteur directeur de est .
Interprétation : Quand on se déplace sur la droite du point au point , d’une distance horizontale égale à  , on « monte ou on descend » d’une distance égale à .
, on « monte ou on descend » d’une distance égale à .
d’équation réduite et une droite d’équation réduite  .
.
et sont parallèles si et seulement si elles ont le même coefficient directeur (la même pente), autrement dit : si et seulement si  .
.
Démonstration : et ont comme équations cartésiennes respectives : et  .
.
D’après la propriété sur les droites parallèles vue précédemment dans ce chapitre, on sait que et sont parallèles si et seulement si :  ce qui donne .
ce qui donne .
IV – Système de deux équations linéaire à deux inconnues
Dans ce paragraphe,  sont des nombres réels donnés. On suppose de plus que
sont des nombres réels donnés. On suppose de plus que  et que
et que 
![\[\left\{ \begin{array}{rcr} ax+by & = & c \\ a'x+b'y & = & c' \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-90d761a9761f8a6fa4e9dcafb5c1965d_l3.png "Rendered by QuickLaTeX.com")
Un couple est solution du système si et seulement si et vérifient les deux égalités du système.
Dans la suite du paragraphe on suppose donné ce système de deux équations linéaires à deux inconnues, que l’on appelle  .
.
1. Résolution géométrique d’un système
La première équation de peut s’écrire :  . On reconnaît l’équation d’une droite affine . Le couple est solution de cette équation si et seulement si le point appartient à .
. On reconnaît l’équation d’une droite affine . Le couple est solution de cette équation si et seulement si le point appartient à .
La seconde équation de peut s’écrire :  . On reconnaît l’équation d’une droite affine . Le couple est solution de cette équation si et seulement si le point appartient à .
. On reconnaît l’équation d’une droite affine . Le couple est solution de cette équation si et seulement si le point appartient à .
Ainsi le couple est solution du système si et seulement si le point est le point d’intersection des droites et .
Trois cas sont possibles pour ces deux droites :
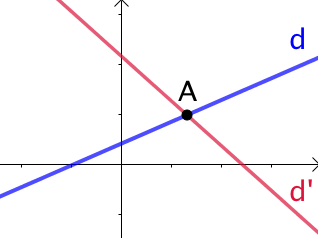
| et sont sécantes |
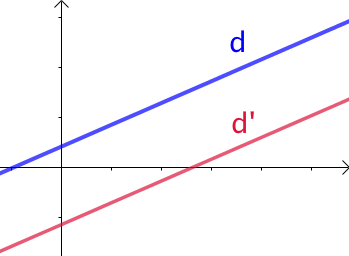
et sont parallèles |
et sont confondues |
 |
 |
 |
| a une seule solution : les coordonnées de leur point d’intersection |
n’a aucune solution |
a une infinité de solutions : les coordonnées de tous les points de |
2) Résolution algébrique d’un système
admet un couple de nombres réels comme solution unique si et seulement si  .
.Démonstration : La résolution géométrique nous a appris que la condition nécessaire et suffisante pour que est une solution unique, est que les deux droites ne soient pas parallèles.
Nous avons vu dans le chapitre précédent que cette condition est remplie dès lors que  .
.
Il existe une démonstration purement algébrique ne faisant pas appel à la géométrie, qui sera proposée sous forme d’exercice.
Il existe deux méthodes de résolution d’un système de deux équations linéaires à deux inconnues : la méthode par substitution et la méthode par combinaison.
Résoudre un système par la méthode de substitution
Cette méthode est efficace si l’un des coefficients  ou
ou  est égal à 1.
est égal à 1.
Le coefficient devant le de la première équation est . On utilise la méthode de substitution qui consiste à :
- exprimer en fonction de puis
- remplacer le de la seconde équation par l’expression en fonction de .
![\[ \text{Exemple : }\left\{ \begin{array}{rcr} x-y & = & -1 \\ 2x+3y & = & 8 \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-c37110f2ec6fd6ba318b0aef0d59c843_l3.png "Rendered by QuickLaTeX.com")
De la première équation  , il vient
, il vient  . On remplace ensuite le de la seconde équation par
. On remplace ensuite le de la seconde équation par  . Cela donne :
. Cela donne :  .
.
En développant on obtient :  , soit
, soit  , donc
, donc  , soit
, soit  .
.
On revient au premier résultat obtenu qui était :  . Comme nous avons calculé que
. Comme nous avons calculé que  , il vient que
, il vient que  .
.
Conclusion : la solution unique du sytème est le couple :  .
.
Question : sommes-nous certains de notre calcul. Un moyen simple de le confirmer est de remplacer les valeurs trouvées pour et dans l’une des équations et de vérifier que cette équation est vérifiée. La première équation est .  c’est bien le résultat attendu.
c’est bien le résultat attendu.
Question : sommes-nous certains que est la seule solution possible ? Calculons l’expression  de ce système :
de ce système :  . Comme on obtient un résultat non nul, nous sommes certains que le système n’a qu’une seule solution.
. Comme on obtient un résultat non nul, nous sommes certains que le système n’a qu’une seule solution.
Résoudre un système par la méthode par combinaison
Cette méthode s’applique si al méthode par substitution n’est pas applicable. Elle consiste à :
- multiplier par un même nombre les deux membres de la première équation ;
- (option) multiplier par un même autre nombre les deux membres de la seconde équation ;
- additionner ou soustraire terme à terme les deux équation pour obtenir une troisième équation où ne subsiste qu’une seule des deux inconnues ou .
![\[ \text{Exemple : }\left\{ \begin{array}{rcr} 2x+3y & = & -1,5 \\ 3x+4y & = & -1 \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-c731da74bdf962ab9681a3c71642e620_l3.png "Rendered by QuickLaTeX.com")
On multiplie par les deux termes de la première équation :  . On obtient :
. On obtient :  .
.
On multiplie par les deux termes de la première équation :  . On obtient :
. On obtient :  .
.
![\[ \text{Le système est maintenant le suivant : }\left\{ \begin{array}{rcr} 6x+9y & = & -4,5 \\ 6x+8y & = & -2 \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-e94a2afc2b298b0c665735773b1dd6f7_l3.png "Rendered by QuickLaTeX.com")
On soustrait membre à membre les termes de la seconde équation des termes de la première. Cela donne l’équation :  , soit après simplification :
, soit après simplification :  .
.
On remplace la valeur trouvée pour dans l’une des deux équation de départ, par exemple la première. On obtient :  , soit
, soit  . Donc
. Donc  .
.
Conclusion : la solution unique du sytème est le couple : 
Deux autres exemples
![\[ \text{Résoudre : }\left\{ \begin{array}{rcr} -x+2y & = & 3 \\ 2x-4y & = & -6 \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-27d6e1f8266ab99e62a9b31590672435_l3.png "Rendered by QuickLaTeX.com")
Si on multiple par  les deux termes de la première équation, on retrouve exactement la seconde équation.
les deux termes de la première équation, on retrouve exactement la seconde équation.
Cela signifie que le système se résume à une seule de ses deux équations :  par exemple. D’un point de vue géométrique, on a un système de deux équations cartésienne de la même droite.
par exemple. D’un point de vue géométrique, on a un système de deux équations cartésienne de la même droite.
Conclusion : Les solutions du système sont les coordonnées de tous les points de la droite d’équation .
![\[ \text{Résoudre : }\left\{ \begin{array}{rcr} \dfrac{3}{2}x-2y & = & 0 \\ x-\dfrac{4}{3}y & = & 1 \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-d44c532e5acdd8e75e9dab06f5cba97f_l3.png "Rendered by QuickLaTeX.com")
Si on multiple les deux termes de la seconde équation par  , on obtient :
, on obtient :  , soit après simplification :
, soit après simplification : 
![\[ \text{Le système s'écrit maintenant : }\left\{ \begin{array}{rcr} \dfrac{3}{2}x-2y & = & 0 \\ \dfrac{3}{2}x-2y & = & \dfrac{3}{2} \\ \end{array} \right.\]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-01f529df62f3109ed6cca78f5f37d2bb_l3.png "Rendered by QuickLaTeX.com")
Conclusion : Ce système n’a aucune solution car  .
.
